PROCESO AUTOMATIZACIÓN DE ENSAMBLADO DE
LLANTAS Y NEUMÁTICOS
Índice
- Introducción
- Descripción del proyecto
- Elementos utilizados
- Medidas de seguridad
1. INTRODUCCIÓN
El proyecto consiste en el diseño de un proceso automatizado de ensamblado de llantas y neumáticos, los cuales serán preparados para poder colocar en coches en su proceso de fabricación.
También se diseñará una celda para meter la zona de trabajo de los robots, como sistema de seguridad.
La programación del robot se realizará mediante el "teaching" que ofrece el programa KUKA Sim Pro.
2. DESCRIPCIÓN DEL PROYECTO
Por una cinta transportadora vendrán las llantas y por otra cinta vendrán los neumáticos, cada cinta tendrá asignado un robot que con sus herramientas cogerán el objeto lo pasarán por una escobilla que estará impregnada de algún tipo de pegamento.
Una vez pasadas por la escobilla un robot colocará la llanta en otra cinta, dicha cinta recorrerá un paso y el otro robot colocará en neumático sobre la llanta, formando un ángulo.
Esta última cinta llevará hasta la máquina ensambladora la llanta junto al neumático.
3. ELEMENTOS UTILIZADOS
- KR 60-3

KR 60-3
Carga media<60 Kg
Carga adicional: 35 Kg
Zona de trabajo: 2429 mm
Nº de ejes: 6
Repetibilidad <+- 0,06
Peso: 679 Kg
Posiciones de montaje: Suelo/Techo
Unidad de control: KRC4
- KUKA SmartPAD

KUKA SmartPAD
Pantalla táctil. Soporte visual. Interación flexible. Cuanto más complejas se vuelven las capacidades de los robots, mayor es el vigor con el que las interfaces de usuario de manejo intuitivo se sitúan en primer plano.
El nuevo KUKA smartPAD muestra en una gran pantalla táctil antirreflectante y de alta resolución lo fácil que es manejar un robot. Los cuadros de diálogo inteligentes e interactivos guían al usuario de forma clara y estructurada por los procesos. Al usuario se le ponen únicamente a disposición los elementos de manejo que necesita en ese momento. con el objetivo de concentrar la atención en lo esencial y permitir que el usuario pueda trabajar de forma intuitiva y por consifuiente, más sencilla, rápida y eficiente.
Interface HMI que se emplea para acceder a la CPU alojada en el armario de control y poder controlar el robot y todos los dispositivos anexos a él de forma manual y gestionar los programas que se encuentran guardados en la memoria del controlador. Dispone de medidas de seguridad integradas como "el pulsador de hombre muerto" que ha de ser accionado y mantenido para gobernar de forma manual el robot y pulsador de paro de emergencia.
- Cinta

- Herramientas
-Pinza para la llanta:


-Pinza para el neumático:



- Cepillo de pegamento:


La llanta y el neumático se pasan alrrededor de este cepillo y se impregnan de pegamento.
- Herramientas máquina calzadora:


4. MEDIDAS DE SEGURIDAD
- Seta de emergencia:
 Pulsador de emergencia, de rearme manual giratorio o por medio de llave, que detiene todos los elementos de la celda en caso de ser accionado.
Pulsador de emergencia, de rearme manual giratorio o por medio de llave, que detiene todos los elementos de la celda en caso de ser accionado.
Índice
- Introducción
- Descripción del proyecto
- Elementos utilizados
- Medidas de seguridad
1. INTRODUCCIÓN
El proyecto consiste en el diseño de un proceso automatizado de ensamblado de llantas y neumáticos, los cuales serán preparados para poder colocar en coches en su proceso de fabricación.
También se diseñará una celda para meter la zona de trabajo de los robots, como sistema de seguridad.
La programación del robot se realizará mediante el "teaching" que ofrece el programa KUKA Sim Pro.
2. DESCRIPCIÓN DEL PROYECTO
Por una cinta transportadora vendrán las llantas y por otra cinta vendrán los neumáticos, cada cinta tendrá asignado un robot que con sus herramientas cogerán el objeto lo pasarán por una escobilla que estará impregnada de algún tipo de pegamento.
Una vez pasadas por la escobilla un robot colocará la llanta en otra cinta, dicha cinta recorrerá un paso y el otro robot colocará en neumático sobre la llanta, formando un ángulo.
Esta última cinta llevará hasta la máquina ensambladora la llanta junto al neumático.
Esta última cinta llevará hasta la máquina ensambladora la llanta junto al neumático.
3. ELEMENTOS UTILIZADOS
- KR 60-3
|
| KR 60-3 |
Carga media<60 Kg
Carga adicional: 35 Kg
Zona de trabajo: 2429 mm
Nº de ejes: 6
Repetibilidad <+- 0,06
Peso: 679 Kg
Posiciones de montaje: Suelo/Techo
Unidad de control: KRC4

- KUKA SmartPAD
|
| KUKA SmartPAD |
Pantalla táctil. Soporte visual. Interación flexible. Cuanto más complejas se vuelven las capacidades de los robots, mayor es el vigor con el que las interfaces de usuario de manejo intuitivo se sitúan en primer plano.
El nuevo KUKA smartPAD muestra en una gran pantalla táctil antirreflectante y de alta resolución lo fácil que es manejar un robot. Los cuadros de diálogo inteligentes e interactivos guían al usuario de forma clara y estructurada por los procesos. Al usuario se le ponen únicamente a disposición los elementos de manejo que necesita en ese momento. con el objetivo de concentrar la atención en lo esencial y permitir que el usuario pueda trabajar de forma intuitiva y por consifuiente, más sencilla, rápida y eficiente.
Interface HMI que se emplea para acceder a la CPU alojada en el armario de control y poder controlar el robot y todos los dispositivos anexos a él de forma manual y gestionar los programas que se encuentran guardados en la memoria del controlador. Dispone de medidas de seguridad integradas como "el pulsador de hombre muerto" que ha de ser accionado y mantenido para gobernar de forma manual el robot y pulsador de paro de emergencia.- Cinta

- Herramientas
-Pinza para la llanta:
-Pinza para el neumático:



- Cepillo de pegamento:


La llanta y el neumático se pasan alrrededor de este cepillo y se impregnan de pegamento.
- Herramientas máquina calzadora:
4. MEDIDAS DE SEGURIDAD
- Seta de emergencia:
Pulsador de emergencia, de rearme manual giratorio o por medio de llave, que detiene todos los elementos de la celda en caso de ser accionado.
- Barrera fotoeléctrica:
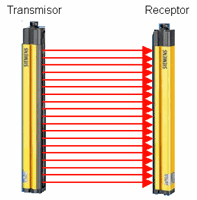 Sensor de presencia de tipo lineal compuesto por múltiples haces invisibles de luz láser, situada en las zonas de entrada y salida de piezas a la celda robotizada, que detecta la entrada de objetos.
Sensor de presencia de tipo lineal compuesto por múltiples haces invisibles de luz láser, situada en las zonas de entrada y salida de piezas a la celda robotizada, que detecta la entrada de objetos.
- Baliza de señalización:
 Indica el estado de funcionamiento del proceso mediante señales luminosas.
Indica el estado de funcionamiento del proceso mediante señales luminosas.
- Valla metálica:
 Limita físicamente el acceso no autorizado a la zona de trabajo de la maquinaria móvil. La pintura, en caso de llevarla, ha de ser de color negro para el vallado y amarillo para los pilares.
Limita físicamente el acceso no autorizado a la zona de trabajo de la maquinaria móvil. La pintura, en caso de llevarla, ha de ser de color negro para el vallado y amarillo para los pilares.
 Click en la imagen para ver
Click en la imagen para ver
 Click en la imagen para ver
Click en la imagen para ver
Proyecto2016
- Barrera fotoeléctrica:
- Baliza de señalización:
Indica el estado de funcionamiento del proceso mediante señales luminosas.- Valla metálica:
Limita físicamente el acceso no autorizado a la zona de trabajo de la maquinaria móvil. La pintura, en caso de llevarla, ha de ser de color negro para el vallado y amarillo para los pilares.
Click en la imagen para ver

Click en la imagen para ver
No hay comentarios:
Publicar un comentario